
| Pin | Nombre | Descripción |
|---|---|---|
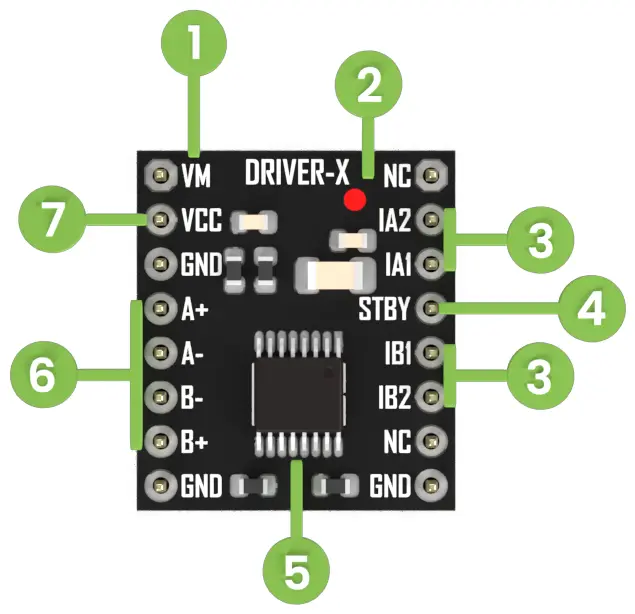
| 1 | VM | Voltaje de los motores (2.5V - 16V) |
| 2 | VCC | Voltaje de la lógica (5V) |
| 3 | GND | GND |
| 4 | A+ | Salida positiva para motor A |
| 5 | A- | Salida negativa para motor A |
| 6 | B- | Salida negativa para motor B |
| 7 | B+ | Salida positiva para motor B |
| 8 | GND | GND |
| 9 | NC | |
| 10 | IA2 | Entrada de control para motor A |
| 11 | IA1 | Entrada de control para motor A |
| 12 | STBY | Standby |
| 13 | IB1 | Entrada de control para motor B |
| 14 | IB2 | Entrada de control para motor B |
| 15 | NC | |
| 16 | GND | GND |
| Controlador | TC78H660FNG | |
| Voltaje de operación | 5 V | |
| Corriente de salida | 2 A (Max) | |
| Frecuencia PWM | 400 kHz (Max) | |
| Consumo de corriente | 2.8 mA - 4.3 mA | |
| Umbral de apagado térmico (TSD) | 145°C - 175°C | |
| Umbral del circuito de protección de sobre corriente (ISD) | 2.5ª – 4.2ª |